
Dynamic Lifting by Whole Body Motion of Humanoid Robots
Résumé
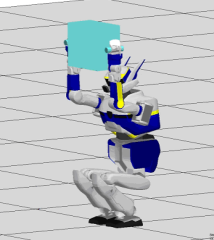
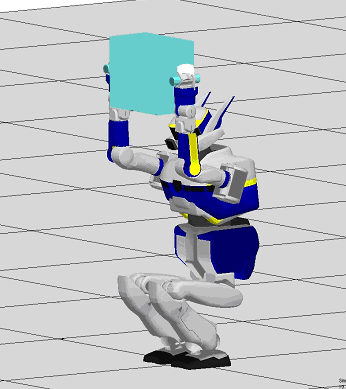
A motion control method of lifting a heavy object up to a higher position with humanoid robots is developed. The key issue of lifting motion is how to reduce the load on humanoid arms in which low-power actuators are implemented. The use of singular postures of arms is well-known to avoid actuator saturation of the arms. By combining two different kinds of humanoid motions such as accelerating an object upward and sliding the body into under the object, we propose a method that enables to transit one singular posture of arms to another while lifting the object. Simulation results show the effectiveness of the proposed method for reducing the load on the arms. We realize a motion of lifting a heavy object dynamically with the humanoid robot HRP-2 through experiment.
Domaines
Automatique / Robotique
Fichier principal
 2008_IROS.pdf (483.24 Ko)
Télécharger le fichier
2008_IROS.pdf (483.24 Ko)
Télécharger le fichier
 HRP2_Alteres.png (29.93 Ko)
Télécharger le fichier
HRP2_Alteres.png (29.93 Ko)
Télécharger le fichier
{kind=link}
| Origine | Fichiers produits par l'(les) auteur(s) |
|---|
| Format | Figure, Image |
|---|
Loading...