
Study of an External Passive Shock-absorbing Mechanism for Walking Robots
Résumé
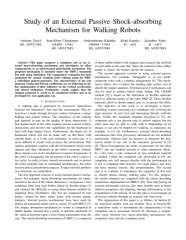
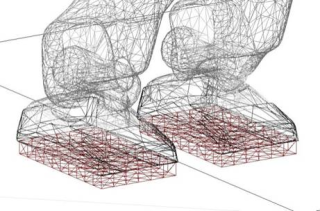
This paper proposes a compliant sole as an external shock-absorbing mechanism and investigates its effect comparatively to an ankle-located joint-flexible mechanism. The proposed mechanism is mounted under the HRP-2 humanoid feet only using simulation. The comparative evaluation has been conducted for contact resulting from walking using the HRP-2 embedded pattern-generator. The characteristics of the sole material, Young and Poisson coefficients, are set following an adhoc minimization of their influence on the vertical acceleration and lateral inclination. Preliminary results suggest that the solution proposed is worth to be considered further and to be developed for real application use.
Domaines
Automatique / Robotique
Fichier principal
 2008_Humanoids.pdf (875.75 Ko)
Télécharger le fichier
2008_Humanoids.pdf (875.75 Ko)
Télécharger le fichier
 HRP2_Semelles.png (178.7 Ko)
Télécharger le fichier
HRP2_Semelles.png (178.7 Ko)
Télécharger le fichier
{kind=link}
| Origine | Fichiers produits par l'(les) auteur(s) |
|---|
| Format | Figure, Image |
|---|
Loading...