
Interactive Dynamic Simulator for Humanoid Robots with Deformable Soles
Résumé
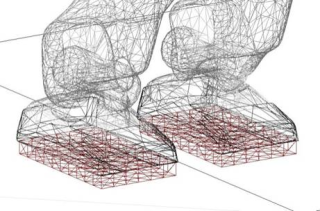
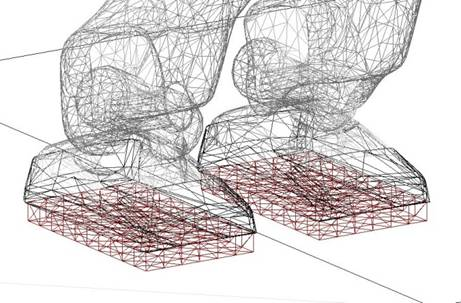
We present an interactive dynamic simulator for poly-articulated bodies. We use constraint-based methods to compute contact forces with non-discretized friction, allowing fast simulation. The user can interact with the virtual environment while sensing force feedback through a haptic device. We integrated in our simulator the possibility to design and model an external passive system that allows to absorb shocks generated by impacts. Especially we fixed in simulation a compliant sole under HRP-2 humanoid robot feet. We illustrate our talk by giving a simulation example.
Domaines
Automatique / Robotique
Fichier principal
 2008_RSJ.pdf (492.73 Ko)
Télécharger le fichier
2008_RSJ.pdf (492.73 Ko)
Télécharger le fichier
 HRP2_Semelles.png (178.7 Ko)
Télécharger le fichier
HRP2_Semelles.png (178.7 Ko)
Télécharger le fichier
{kind=link}
| Origine | Fichiers produits par l'(les) auteur(s) |
|---|
| Format | Figure, Image |
|---|
Loading...