
Learning collaborative manipulation tasks by demonstration using a haptic interface
Résumé
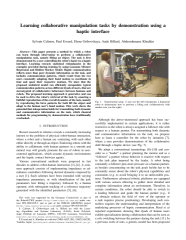
This paper presents a method by which a robot can learn through observation to perform a collaborative manipulation task, namely lifting an object. The task is first demonstrated by a user controlling the robot's hand via a haptic interface. Learning extracts statistical redundancies in the examples provided during training by using Gaussian Mixture Regression and Hidden Markov Model. Haptic communication reflects more than pure dynamic information on the task, and includes communication patterns, which result from the two users constantly adapting their hand motion to coordinate in time and space their respective motions. We show that the proposed statistical model can efficiently encapsulate typical communication patterns across different dyads of users, that are stereotypical of collaborative behaviours between humans and robots. The proposed learning approach is generative and can be used to drive the robot's retrieval of the task by ensuring a faithful reproduction of the overall dynamics of the task, namely by reproducing the force patterns for both lift the object and adapt to the human user's hand motion. This work shows the potential that teleoperation holds for transmitting both dynamic and communicative information on the task, which classical methods for programming by demonstration have traditionally overlooked.
Fichier principal
 2009_icar_calinon-Learning_collaborative_manipulation_tasks.pdf (883.15 Ko)
Télécharger le fichier
2009_icar_calinon-Learning_collaborative_manipulation_tasks.pdf (883.15 Ko)
Télécharger le fichier
| Origine | Fichiers produits par l'(les) auteur(s) |
|---|
Loading...